





What’s in the Modules?
The atmosphere dynamics infrastructure comprises transportable remote sensing instruments and in situ instrumentation for operation on the ground as well as on balloons. Their coordinated operation delivers 3D information on physical atmospheric conditions such as turbulences or temperature distribution from inside and outside of rain clouds.
- LiDAR
systems (KIT): The ground-based Doppler LIDAR systems is specifically designed to measure
wind based on the Doppler effect which describes the
frequency shift of light which is scattered on moving objects (more). A 3D
scanning aerosol LIDAR as an active laser remote sensing instrument was
integrated to provide information about the particle distribution in the
atmosphere such as fog detection, remote cloud base height and more.

- Cloud
radar (KIT): A novel frequency modulated continuous wave radar provides vertical
profiles of the radar reflectivity factor with high temporal and spatial
resolution. These profiles contain information about cloud geometry, i.e.
number of cloud layers present, cloud top altitude, thickness, and presence of
precipitation.
The obove mentioned instrumentation is part of the KITcube. - Mini-balloons (FZJ): Balloon profiling is planned before and after strong convective storms, ideally up to a height of 35 km. The balloon payload is carrying a Vaisala radiosonde for temperature and humidity profiling, an electrochemical concentration cell (ECC) as a lightweight, compact balloon-borne instrument for measuring atmospheric ozone, a cryogenic frost point hygrometer (CFH) for exact water vapor measurement and a lightweight backscatter sonde COBALD (Compact Optical Backscatter and AerosoL Detector), designed to be flown on operational weather balloons to measure the backscatter ratio of aerosols and cloud particles.

The atmospheric
chemistry module provides miniaturized instrumentation for key air quality
parameters such as ozone, nitrogen oxides, aerosols and their precursors (VOC,
oxygenated VOC). To fulfill the MOSES requirement of fast and flexible
deployment, drones, compact instruments and small mobile remote sensing
detectors are primarily used. The formation of secondary organic aerosols will
be quantitatively assessed by a lightweight and mobile single particle aerosol
mass spectrometer. Measurements of tropospheric columns of ozone and other
trace gases will be made by mobile OP-FTIR spectrometers.
- Air quality drone (FZJ): fixed-wing drone used for profiling physical and chemical characteristics of the planetary boundary layer such as temperature, pressure, humidity, turbulences, particle distribution and trace gases (NO2, NO, O3, CO).
- Zeppelin air quality setup (FZJ): full remotely controlled Tunable-Diode-Laser instrument (MIRO Analytical AG), for real-time detection of 10 atmospheric trace gases (NO, NO2, O3, CO, CO2, CH4, H2O, N2O, SO2, NH3) complemented by several chip-based mini sensors (PM10, O3, NO, CO, NO2, RH, T, p) and a GPS system for regional air quality measurements in the planetary boundary layer. The setup is designed for concurrent operation during passenger flights which reduces operational costs and increases deployment significantly.

Mobile aerosol mass spectrometer (KIT): on-line and real-time detection of volatile organic compounds (e.g., BVOCs) in ambientair based on CHARON (“Chemical Analysis of Aerosol Online”) particle inlet and a proton-transfer-reaction time-of-flight mass spectrometer (PTR-ToF-MS).
- Open-Path Fourier Transform
Infrared (OP-FTIR) spectrometer (KIT): mobile solar-tracking infrared spectrometer to quantify passively greenhouse gases, mainly the concentration of CO2, CH4 and N2O by analyzing the radiation of the sun. Due to the compact and robust design, the spectrometers are highly portable and ideally suited for measurement campaigns in remote areas with little infrastructure. (more)

- LiDAR systems (KIT): The ground-based Doppler LIDAR systems is specifically designed to measure light which is back-scattered on moving objects (see also module Atmospheric Dynamics).
Mini-balloons (FZJ): Balloon profiling is planned up to 35 km (see also module Atmospheric Dynamics).
This module comprises mobile systems to measure exchange fluxes (heat, H2O, CO2 and other GHGs, including isotopic signatures) between the land surface and the atmosphere. The MoLEAF Tower units (Mobile Land Ecosystem – Atmosphere Flux Tower) has been developed to ensure swift deployment and self-contained operation with real-time data monitoring for state-of-the-art sensors (e.g. isotope-specific laser absorption analyzers, turbulence sensors). The observing systems include an all-terrain laboratory vehicle and a trailer-mounted pump-up instrument tower (30 m) as well as instruments, computers, power and data transmission equipment. To assess the spatial distribution of atmospheric and terrestrial variables in the tower footprints and between tower sites, miniaturized sensors will be deployed on UAVs or aircraft.
- MoLEAF-Tower: The telescopic mobile mast system is mounted on a trailer and it’s headload ranges up to 500 kg and extended heights from 2 m to 34 m. Several sensors needed for Eddy-Covariance (EC) measurements such as GHG analyzer (CO2 infrared, CH4 laser, N2O laser, CO2 and H2O isotope analyzer), spectrophotometer, ultrasonic anemometer, cameras including real-time data management (transfer, storage, visualization) can be installed. The energy supply is provided by fuel cells.

- GHG Isotope analyzers (FZJ): Laser-based isotopic analyzers are used to determine oxygen, nitrogen and carbon isotope ratios in CO2, CH4, N2O and H2O aiming at the identification and quantification of the different emission sources in natural, agricultural and forestry landscapes. The analyzers are installed in a climatized mobile laboratory trailer (IsoMobile) which, together with the MoLEAF-tower, can be used flexibly and efficiently in the field (for more information click here).

- UAVs / Drones (GFZ): Energy
and Greenhouse gas fluxes including CH4 and CO2 and H2O are measured using
drones equipped with miniaturized sensors and high resolution cameras - as
already described for the modules Biota
/ Permafrost. A video of the drone can be found here.

CRNS-Rovering (FZJ, UFZ): Cosmic ray neutron sensors (see also module “Water resources”) can be installed on off-road vehicles to allow fast measurements of extensive areas to obtain a spatial soil moisture distribution.
Vegetation dynamics are monitored with optical, multi-spectral, IR and thermal sensors installed on drones. The spatial-temporal patterns will be used to infer soil water availability within the root zone and to assess biomass productivity and fitness. Deciphering the dynamic relationships between community structure and ecosystem functions during heat waves and droughts is advanced by profiling microbiomes via portable genomic and transcriptomic sequencing and LC-MS/MS-based metabolomic analysis. The impact of floods and low flows on water quality and aquatic ecosystems will be investigated in situ with mobile mesocosms and by remote-controlled vertical profiling, applying high-resolution stereoscopic cameras.
- UAVs / Drones (GFZ, FZJ, UFZ, GEOMAR): the drones are equipped with different imaging sensors. Optical and spectral images of the land surface will be obtained from different types of cameras (RGB, IR-thermal, multispectral, hyperspectral). Highly sensitive infrared cameras provide temperature maps of the land or water surface, capturing even small temperature differences. Hyperspectral images are used to derive information on the vegetation state or algae activity in surface waters. For further drone applications please click here.

- Bio-aerosol samplers (HMGU): bio-aerosol samplers are used to determine spatial-temporal dynamics of biota which are transferred by air between ecosystems as a result of heat waves directly affecting also human health.

- Metagenom / Metabolom monitoring-platform (HMGU): the system consists of a mobile laboratory platform equipped with automatic devices for sampling and storage as well as stationary instruments for high-throughput profiling to determine organismic and metabolomic networks of plant - microbe systems under stress. The latter instruments include a LC-QToF-MS (liquid chromatography quadrupole time-of-flight mass spectrometer) and sequencing machines for the generation of long and short read sequences.
- Mobile Mesocosm - MOBICOS (UFZ): are research platforms consisting of mobile container-based laboratories, which enable the biochemical analysis of running waters as well as the execution of restricted ecological experiments (see also module "Soil and Water Quality").
The module comprises geophysical sensor systems for monitoring changes in soil moisture and total subsurface water storage variations. The equipment setup facilitates measurement of these variables from the point scale to the catchment scale. The equipment enables assessment of catchment wetness conditions that trigger the formation of hydrological extreme events as well as event-induced changes in the water balance.
-
Cosmic Ray Neutron probes (UFZ, FZJ, GFZ): Cosmic ray neutrons are
omnipresent on Earth, and their albedo component carries information about the
near-surface environment (e.g. Zreda et al., 2012; Schrön et al., 2018). With
special detectors the response of neutron background radiation to water is
typically probed within a radius of 140 to 240 m and at depths of 20 to 80 cm
depending on moisture, thus leading to a volume‐averaged characterization of the environmental
water content. These detectors can be installed on off-road vehicles to allow a
fast measurement of extensive areas (see also here).

- Wireless soil moisture
sensor networks (UFZ, FZJ) : The mobile ad-hoc wireless sensor networks consist of several
hydrometeorological sensors. The autonomous networks measure soil moisture and
soil temperature and transmit the data via wireless communication to the remote
database, where they can be visualized in real time. The single nodes can be
extended with additional sensors like PAR radiation and air temperature (more).

- Level- / Barologger (UFZ, GFZ): low cost data logger to monitor surface and
groundwater levels that are optimized in terms of energy consumption for
long-term recording.
- Gravimeters (GFZ): Variable mass distributions in the subsurface - also caused by changes in water storage - can be detected by measuring the time-variable gravity. Thus, terrestrial gravimetry with absolute and relative gravimeters is aiming at monitoring catchment storage dynamics and runoff generation during flood and drought events. We run a pool of mobile gPhone and CG-6 gravimeters in combination with the gPhone Solar Cube and complement this with a novel absolute quantum gravimeter (more).

For the investigation of heat and drought as well as flood impacts on soil and water quality, multi-parameter sensors (nutrients, turbidity, chlorophyll), stable isotope and pollutant measurements and UAV-based monitoring systems will operate as a joint platform. The use of thermal cameras allows a spatially continuous mapping of proxies for surface water conditions.
- Multi-parameter probes (UFZ, HZG, GEOMAR): measurement of biological, chemical and physical properties of surface waters and groundwater. The observables are e.g., temperature, conductivity, pressure, turbidity, salinity, currents, pH, alkalinity, phosphorus, nitrate, oxygen, chlorophyll. For investigations of limnic surface water systems they are often coupled with buoy platforms. (Read more here.)
- Imaging spectroradiometer (GFZ): Hyper-Cam-LW Sensor: The FTIR Fourier-Transform Infrared sensor is used for hyperspectral infrared imagery from 7.7 – 11.8 μm providing images with 320 x 256 pixels Focal Plane Array. The ground-based or airborne application targets the influence of heat and droughts on soil and vegetation based on thermal hyperspectral remote sensing.

- Event-triggered water sampler (UFZ): are designed to capture short-term events of peak exposure after heavy rain falls and flooding. The novel automatic samplers warne via phone message and report a rising water level. They actively collect and cool the water samples which are then analysed in the laboratory. (Please click here for more information.)
- Mobile Mesocosms MOBICOS (UFZ): are novel research platforms consisting of two mobile container-based laboratories, which enable the biochemical analysis of running waters as well as the execution of restricted ecological experiments. The installation of the containers on trailers and the self-sufficient energy supply with fuel cells allows high flexibility for field measurements. The containers are equipped with a wide range of sensors (e.g. multi-parameter probes). The water is sampled directly from rivers and analysed immediately (more).

The module is designed to observe the space-time variability of flow and sediment characteristics during floods as well as low flow periods. It consists of equipment to monitor rivers and coastal waters. The module is deployable from upstream catchment areas to downstream river floodplains, lakes and coastal waters.
- Acoustic Doppler Current Profiler (ADCP) (HZG, GEOMAR): is a current meter that utilises the Doppler effect to measure velocity. Water velocities are determined relative to a platform (ship, fixed observatory) from which the absolute velocity of water bodies are derived (see also here).
- Multi-parameter probes (HZG, GEOMAR, AWI, UFZ): sensors measuring physical water parameters (CTD = conductivity, pressure, temperature; turbidity; fluorescence)
- Drifters (GFZ, HZG): small floaters with miniaturized sensors that deliver lagrangian measurements of physical parameters in small rivers are currently being developed. This monitoring system opens up new views and insights on flow and transport in the stream network, as standard hydrological monitoring is usually based on fixed point (Eulerian) measurements. Drifter measurements include: temperature, turbidity, velocity, turbulence and electric conductivity. Wireless data transfer will allow online tracing of the various drifters and their measurements as well as pinpointing their location for later retrieval.
- Piezometer network (GFZ): A network of shallow groundwater observation wells in the footslope and riparian area provides information on catchment connectivity and runoff generation processes. These observation wells or piezometers are equipped with water level, temperature and electric conductivity sensors. Small, versatile data loggers with wireless data transfer capacities on a variety of channels are currently being developed to enable real-time data transfer and monitoring.
- Automated Discharge Measurement System (GFZ):
Stream discharge is usually determined by measuring water levels and the use of
a rating curve based on a series of manual discharge measurements at different
stream stages. However, especially at high water levels this rating curve is
often extrapolated or based on very few data points. This results in high
uncertainty of the discharge values. We here develop and test an automatic
discharge measurement system based on salt dilution. This work is carried out
in collaboration with Fathom Ltd (Canada).

The physical
characteristics of permafrost surface (microtopography), subsurface (thermal
state, ice and water content, depth to frozen layer) and thaw (thermokarst,
subsidence, erosion) will be quantified using terrestrial laser scanning (TLS)
and high resolution surveys of the terrain surface. The upper thawed layer (1
m) will be equipped with temperature, soil moisture and heat flux sensors. A
coring device (10 m) will enable access to deeper physical permafrost
properties. Aquatic broadband seismic sensors will map the permafrost depth and
thaw across the terrestrial and aquatic boundary, in shallow submarine regions
and lakes.
- UAVs (GFZ, GEOMAR): the drones are equipped with different sensors and are used in different fields of application. Optical and spectral images of land surface will be obtained from different types of cameras (RGB, IR-thermal, hyperspectral). Highly sensitive infrared cameras provide temperature maps of the land or water surface, capturing even small temperature differences. A special sensor drone system for the determination of the greenhouse gas emission exchange (e.g. methane flux) between Earth and atmosphere was developed (see also module "Land-Atmosphere Fluxes").
- Greenhouse Gas analysers (AWI): provide fast measurements of trace
gas concentrations such as CO2, H2O and CH4 in the atmosphere and help to
detect zones of intense gas fluxes. An example measurement can be found here.
- DGPS-RTK system (AWI): positioning in centimeter resolution based on the differential global positioning system (DGPS) with real time kinematic correction to obtain high precision land surface data.
- Autonomous bathymetric measuring boat (AWI): small unmanned boat to obtain information on lake bottom structures.

- Passive seismic system (GFZ): is used to monitor ambient seismic noise from the shallow sea floor based on the application of Mobile Ocean Bottom Seismometer (MOBSI), see also here.
- More information about the permafrost observation systems are available in this
campaign report document (1.5 MB)
.

Fixed-point observatories are transportable, but stationary platforms equipped with physical, hydrological, biogeochemical and biological sensor systems that serve to monitor seasonal to annual changes of environmental conditions as well as their variability on event-related time-scales. These observatories will deliver data beyond point measurements by being equipped with vertical profiling sensor elevators and autonomous underwater robots for three-dimensional surveys. Buoys and landers will be equipped with fuel cell technology to ensure a reliable, steady, and substantial power supply for energy-intensive units like cameras.
- Winched profiling CTD (HZG): measures physical water parameters (conductivity, pressure, temperature) as it travels vertically through the water column. A real-time profiling CTD allows viewing and storing data at essentially the same time that the measurement is being made and can provide information where to take the water samples. (See here for more details.)
- Underwater Nodes (AWI, HZG): provide the necessary infrastructure, i.e., power and data communication, to continuously operate even complex and power consuming sea bottom based sensor systems (see also here).
- Moorings (HZG, AWI): steel wire or synthetic rope which holds sensors and instruments at selected depth and likewise flotation glass or foam buoys which provide buoyancy to keep the construction upright. The mooring is anchored at a fixed location by a bottom weight.
- Fuel Cell Lander (GEOMAR): fixed lander system using O2/H2 providing up 110 kWh of energy at the sea-floor. Interfaces to external sensors and vehicles include inductive coupling and wet-pluggable units.
- WireWalker (HZG): a vertically profiling instrument-platform powered by ocean waves. Attached to a free-drifting or moored buoy, the Wirewalker ratchets downward along a suspension wire under wave power and can be equipped with a suite of different hydrographic sensors as well as plankton camera systems. During vibration free upward movement the instrument takes high resolution plankton and particle images as well as temperature, salinity and fluorescence information.
Instruments carried on mobile platforms are an essential observation component for oceans and coastal areas. These platforms include fast and mobile inflatable boats, mobile measuring systems and laboratory containers including a multitude of sensors and instruments measuring physical, biogeochemical and biological variables. These platforms complement observations from the stationary platforms and autonomous vehicles.
- Drag chains (HZG):
in order to carry out measurements in many different water depths simultaneously,
a measurement chain is used for sampling the upper 45 m of the water column at
speeds up to 10 knots. The chain is equipped with various sensors to measure temperature,
salinity, oxygen concentration and chlorophyll of sea water.
- Scanfish (HZG): is towed by a vessel and moves up
and down in the water column. It carries several oceanographic sensors. During
the continuous up-and-down movements,
water density , oxygen content and chlorophyll concentration are
measured along the course of the research vessel (see for more here).
- FerryBoxes (HZG, AWI, UFZ): are automatic measuring systems
that are used to determine physical and biogeochemical parameters in surface
waters. There are several options to install the FerryBoxes: on research
vessels, autonomously on ferries, container ships or at fixed stations. The
FerryBox is used to determine temperature, salinity, turbidity, chlorophyll, pH
, oxygen, algae groups and nutrients.
- Multi-parameter probes measuring chemical and physical properties (HZG, AWI, GEOMAR, UFZ): methane, nitrate Rhodamin, chlorophyll a, turbidity, salinity, currents, pH, alkalinity.
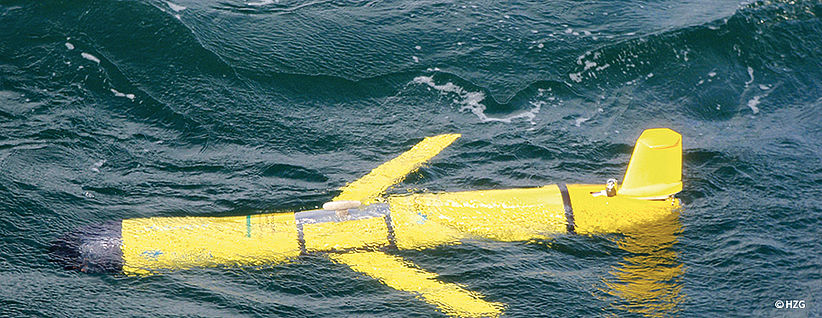
The module comprises autonomous sensor platforms that operate in the ocean (Underwater Gliders) and at the ocean surface (Wave Gliders). Both platforms will be equipped with physical/chemical sensor packages for studying physical-biogeochemical coupling and the ocean’s sink/source function for greenhouse gases. Several AUVs for multi-parameter physical/chemical studies and acoustic/optical mapping will operate at depths of up to thousand meters. Small robots for physical/chemical profiling will be used to create spatially highly resolved observations of small-scale patterns such as fronts.
- Wave Glider SV3 (GEOMAR): is a product by Liquid Robotics and a long-term operational surface glider vehicle for marine research. The SV3 uses both, waves and stored solar energy for forward propulsion, allowing it to travel tens of thousands of miles and collect and deliver data in real time. It is capable of independently performing scientific measurement tasks over periods of several months. The automatic identification system (AIS) is important for automatic tracking of the glider and for collision avoidance. More information can be obtained here.
- G3 Slocum Underwater Glider (GEOMAR, HZG): is an unmanned diving robot by Blue Ocean Monitoring. It weighs between 50 and 60 kg depending on the payload and can operate for up to 12 months. The Slocum G3 can glide up to 1,000 metres depth and travel up to 13,000 kilometres. It is able to carry sensors such as CTD sensors (conductivity, temperature and pressure), hydrophones, magnetometers and gas sensors. For more details please click here.
- Autonomous Underwater Vehicle (AUV) Girona 500 (GEOMAR): was designed by the Institute of Computer Vision and Robotics, University of Girona (Spain). It is an unmanned wireless underwater robot and able to hold its position and depth within the water column. It is used for investigations following a predefined mission programme either close to the seafloor or within the water column. The AUV is able to carry a great variety of instruments and measurement tools such as cameras, a side-scan sonar system (SSS) or multibeam echosounder systems (MBES) for hydroacoustic 2D and 3D seafloor mapping.

- Benthic Deep-Sea Rover (BDSR) (GEOMAR): The BDSR represents a 6-wheeled vehicle for benthic biogeochemical investigations at the seafloor in water depths down to 6000 m. The vehicle has been constructed for repeated measurements of solute exchange between the seafloor and the bottom water over time periods of several months. This allows to resolve dynamic processes as well as the spatial variability at the hitherto highly under-sampled deep-sea floor. The vehicle is presently under construction at GEOMAR and will conduct its first mission in 2021 offshore Mauritania to resolve the input of organic carbon to sustain deep-sea benthic communities delivered by productive eddies passing along at the sea surface. The DSR will move along a predefined path and conduct up to 70 flux measurements. It will be equipped with two benthic flux chambers and sensors for the measurement of oxygen, pH, turbidity, physical properties of the bottom water (CTD), and the current regime (ADCP). A pump module allows the injection of solutes. Furthermore, a camera system will be used to image the seafloor prior to each flux measurement. For future missions, additional sensors can be implemented.

DuoLIM is an airborne L-Band SAR system and will produce special data products based on the synthetic aperture radar technique (SAR) similar to Tandem-L. Thanks to this novel imaging technique DuoLIM will provide urgently needed information for solving pressing
scientific questions in the areas of the biosphere, geosphere,
cryosphere, and hydrosphere. Scientific design and setup of the sensor will start in 2018. The first application is planned for 2020.